Insider Brief
- A study found that entangling qubits to represent robot joints can reduce the number of iterations needed to solve inverse kinematics.
- In simulations, the entangled quantum approach reached target positions more quickly and with higher accuracy than both non-entangled quantum circuits and classical methods.
- Tests on a 64-qubit superconducting quantum computer confirmed the method’s feasibility, despite noise-related accuracy loss.
A research team from Shibaura Institute of Technology, Waseda University, and Fujitsu has demonstrated a hybrid quantum–classical method that could accelerate one of robotics’ most calculation-heavy tasks: determining the joint angles needed for a robot’s arm to reach a desired position. The work, published in Scientific Reports, focuses on what the researchers refer to as inverse kinematics — a problem that becomes computationally intense as the number of joints, or degrees of freedom, increases.
For complex arms, there are often many joint configurations to position the end of the arm –often called the end-effector position. That complexity forces classical algorithms to search through a large space of possible solutions. By mapping robot joints directly to qubits and introducing quantum entanglement between those qubits, the team was able to help the robot figure out the right joint angles more quickly and with better precision.
The researchers added that the approach could, in the long term, help robots adjust their movements in real time, even in environments where speed and precision are critical.

Background: Why Inverse Kinematics Is a Bottleneck
In robotics, problems go both ways. The inverse kinematics (IK) problem is the reverse of the better-known forward kinematics problem.
Forward kinematics starts with a list of joint angles and calculates where the end of the arm will be in space. Inverse kinematics starts with the desired end position and works backward to find the joint angles that will put it there.
The difficulty lies in the fact that robots often have redundant degrees of freedom (DOF). A typical industrial manipulator may have six DOF, three for position and three for orientation, but many designs add extra joints for flexibility and obstacle avoidance. In these cases, there can be infinitely many valid solutions, and no straightforward formula to pick the best one.
Classical algorithms use optimization techniques like gradient descent, conjugate gradient methods, or linear programming to search for an acceptable solution under constraints. These methods can be slow, especially when they must run repeatedly during complex motion sequences.
The Quantum Twist
The new method replaces the classical forward kinematics step with a quantum circuit. Each link in the robot is represented by a qubit — the fundamental unit of quantum information — whose state can be visualized as a point on the Bloch sphere, a three-dimensional globe that represents quantum states.
Rotation gates applied to each qubit mimic the way a physical joint changes the orientation of its link in space. For example, RX, RY, and RZ gates rotate the qubit around the X, Y, and Z axes, just as a robot’s joint can roll, pitch, or yaw. Once the forward kinematics are done in the quantum circuit, a classical optimizer compares the resulting end-effector position to the target position and adjusts the joint angles for the next iteration.
The process repeats until the difference falls below a set threshold. The real advance comes with the use of two-qubit entangling gates — specifically RXX, RYY, and RZZ — between qubits representing adjacent links. In an entangled state, the outcome of measuring one qubit is directly linked to the outcome of measuring the other, even though each retains its own degrees of freedom. In mechanical terms, this models how movement in a parent link affects the position of a child link.
Simulation Results
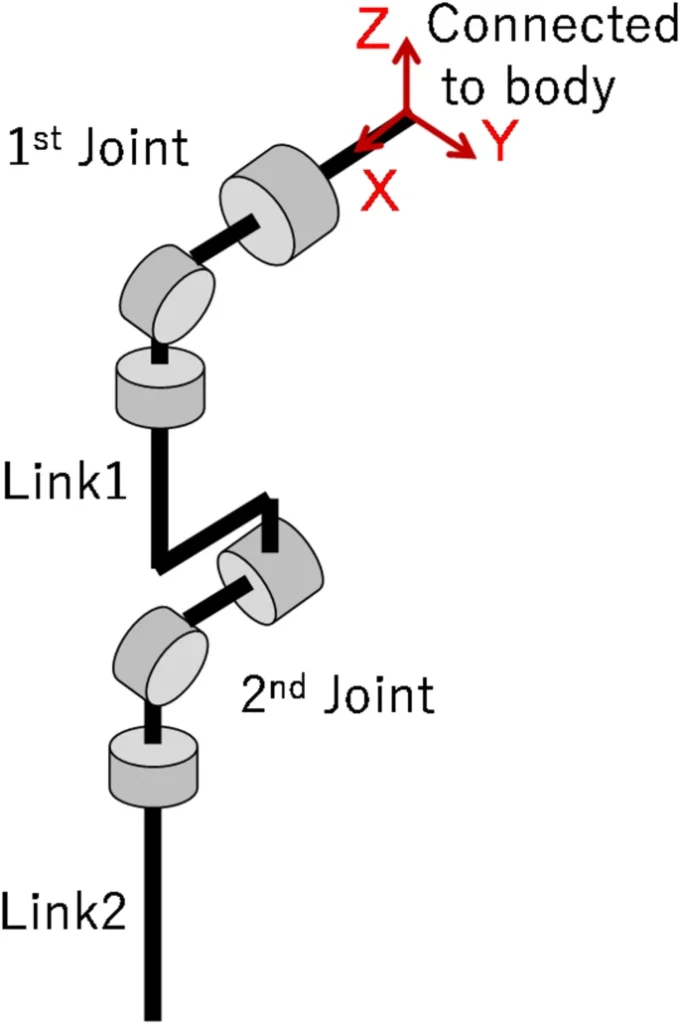
The researchers tested their method on a simulated two-link robot arm, each joint having three rotational degrees of freedom for a total of six DOF. They built two versions of the quantum circuit: one with entanglement and one without. The researchers used the COBYLA (Constrained Optimization BY Linear Approximation) algorithm for the classical optimization loop. Perhaps an oversimplification, but instead of testing every possible answer, this algorithm makes an initial guess, then improves that guess step by step by fitting simple, straight-line approximations to the problem and moving toward better answers.
The researchers then compared the quantum results to a conventional forward-kinematics-plus-optimization setup.
The differences were significant. Without entanglement, the position error remained about 0.5 meters even after 30 iterations. With entanglement, the error dropped dramatically after just eight iterations. The entangled quantum approach reached accurate solutions faster than both the non-entangled quantum circuit and the classical baseline. When the same experiment was run on the Fujitsu mpiQulacs quantum simulator — a 40-qubit simulation backend integrated with Qiskit — the pattern held. The entangled circuit converged faster and more evenly across all spatial axes.
Testing on a Real Quantum Machine
To prove the concept wasn’t just a simulation artifact, the team ran the algorithm on a 64-qubit superconducting quantum computer developed by the RIKEN RQC–Fujitsu Collaboration Center.
The machine operates at around 20 millikelvin and uses microwave control signals to manipulate qubits. As expected, noise in the physical hardware reduced accuracy. Still, after 30 iterations, the entangled quantum circuit cut total positional error from roughly 1.84 meters to 1.04 meters, which is a 43% improvement over the non-entangled version. The improvement mirrored the simulation trend, showing that the approach is viable even on today’s noisy intermediate-scale quantum (NISQ) devices.
Why This Matters for Robotics
In robotics, every millisecond counts when responding to changing conditions.
A method that reaches a valid IK solution in fewer iterations could enable more fluid movement, better obstacle avoidance, and faster adaptation to external forces. While the quantum stage in this method doesn’t replace the classical optimizer, it changes the shape of the problem space in a way that makes the classical search more efficient. In essence, the quantum circuit “bakes in” some of the mechanical dependencies before the optimizer ever starts.
The team writes that there are some limitations — and areas for future work. It only applies to robots with rotational joints; prismatic (linear) joints can’t be represented in the current formulation. The model also captures only one-way influence from parent to child link, not the more complex bidirectional effects that can occur in real mechanisms. Noise remains a practical barrier. The method’s accuracy drops on real quantum hardware compared to simulation, though error-mitigation techniques could narrow that gap. The extra quantum step also adds runtime overhead, which must be weighed against the iteration savings.
The authors suggest two main technical upgrades: using the quantum Fourier transform to encode joint angles as phases across multiple qubits, potentially capturing more intricate dependencies; and parallelizing across links to speed up the computation further — feasible because the method uses only one qubit per link. They also note that as quantum devices scale, it would be possible to model more complex robots, like human-type robots. A humanoid robot with 16 links could be represented with 16 qubits, for example, well within projected NISQ limits.
Quantum Robotics in Context
While admittedly a proof-of-concept type of experiment with lots of room for future improvements, the researchers suggest that their work shows quantum computing’s potential role in robotics is beginning to emerge. Other research has focused on using quantum annealing for trajectory optimization, quantum-inspired particle swarm algorithms for path planning and quantum neural networks for avoiding singularities in robotic arms. What sets this study apart is that it’s not treating robotics purely as a combinatorial optimization problem. Instead, it leverages the geometric nature of quantum states to represent physical postures directly, then uses entanglement to mirror mechanical relationships.
It might be also fair to say that this is an early example of a “structural” quantum advantage — not just crunching numbers faster, but encoding part of the problem into quantum hardware in a way classical systems can’t easily mimic.
Much of the focus in quantum computing has been on domains like chemistry, finance, and cryptography. Robotics adds a different kind of challenge: time-sensitive decision-making in a high-dimensional space with strong physical constraints. The study hints that quantum circuits might one day give robots the ability to compute their next move in milliseconds, without needing vast amounts of preprocessing. That capability could matter in fields as varied as manufacturing, surgery, planetary exploration, and disaster response.
If quantum hardware improves and noise levels drop, hybrid quantum–classical approaches like this could become part of the standard robotics toolkit — not for every task, but for those where speed and mechanical complexity collide.
The team concludes: “By leveraging quantum circuits for forward and inverse kinematics, our approach offers a promising path toward scalable and efficient robotic computation, with further enhancement expected through advanced entanglement-based quantum algorithms.”